





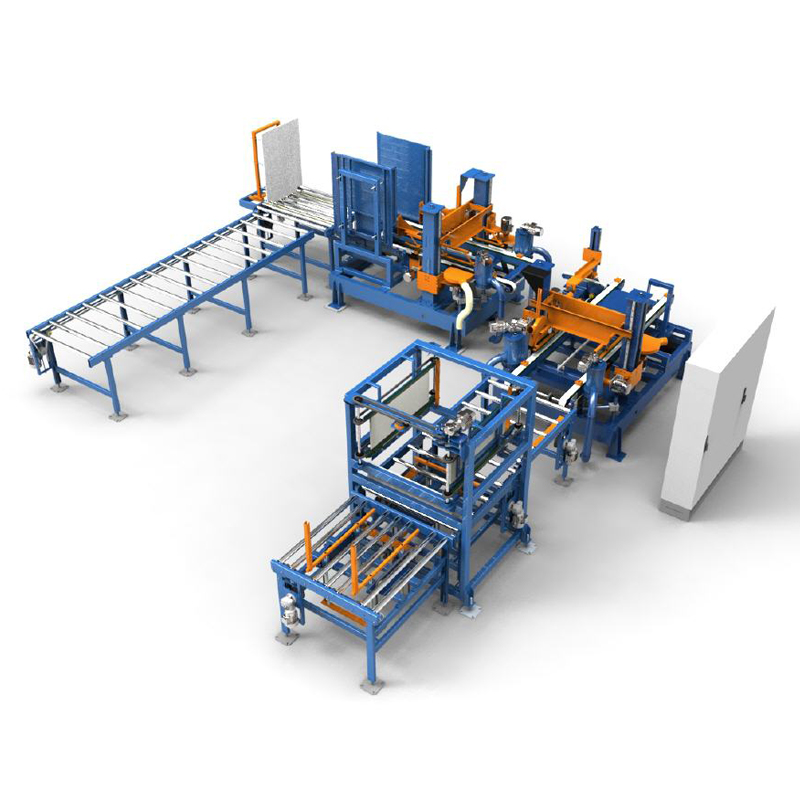

Автоматизированный робот-паллетизатор
Автоматизированный робот для укладки на поддоны:
1. Повышенная эффективность: робот может работать быстрее по сравнению с ручной укладкой на поддоны, что приводит к более высокой производительности и пропускной способности. Это устраняет необходимость в перерывах или сменах, обеспечивая непрерывную работу.
2. Повышенная точность: робот может точно укладывать предметы на поддон с постоянным размещением и выравниванием. Это гарантирует стабильность и безопасность груза во время транспортировки, снижая риск повреждения и необходимость ручной регулировки.
3. Повышенная безопасность: автоматизируя процесс укладки на поддоны, рабочие освобождаются от физического напряжения, связанного с подъемом тяжелых грузов. Это снижает риск травм и создает более безопасную рабочую среду. Кроме того, робот оснащен функциями безопасности, такими как датчики или барьеры, которые предотвращают несчастные случаи и обеспечивают благополучие операторов.
Автоматизированный робот для укладки на поддоны:
Автоматизированный робот для укладки на поддоны, такой как робот для укладки на поддоны для коробок компании Yaskawa Industrial Automation, предлагаемый компанией Automation Robotics and Controls Inc, привносит многочисленные преимущества в процесс укладки на поддоны. Эти роботы значительно повышают эффективность, работая в более быстром темпе, без необходимости перерывов или смен. Благодаря возможностям точной укладки робот обеспечивает точное размещение и выравнивание предметов на поддоне. Более того, эта технология повышает безопасность за счет снижения нагрузки на рабочих, а также включает функции безопасности для предотвращения несчастных случаев. В целом, автоматизированные роботы для укладки на поддоны представляют собой надежное решение для эффективных и безопасных операций по укладке на поддоны.

| ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ РОБОТ-ПАЛЛЕТАЙЗЕРА | ||||
| Робот-манипулятор | Японский бренд-робот | Фанук | Кавасаки | |
| Робот немецкой марки | ПЛАКАТЬ | |||
| Швейцария Марка Робот | АББ | |||
| Основное исполнение параметры |
Скорость Емкость | 8 с за цикл | Отрегулируйте в соответствии с продуктами и расположение на слой |
|
| Масса | Около 8000 кг | |||
| Применимый продукт | Коробки, чехлы, сумки, Сумки-мешки |
Контейнеры, бутылки, банки, ведра и т. д. | ||
| Сила и воздух Требования |
Сжатый воздух | 7бар | ||
| Электроэнергия | 17-25 кВт | |||
| Напряжение | 380 В | 3 фазы | ||
| ПЛК | Сименс | |||
| Преобразователь частот | Данфосс | |||
| Фотоэлектрический датчик | Больной | |||
| Серводвигатель | Панасоник | |||
| Пневматический компонент | СМК | |||
| Низковольтная аппаратура | Шнайдер | |||
| Сенсорный экран | ШнайдерлСименс | |||
| Приводной двигатель | ШИТЬ | |||



| ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ РОБОТ-ПАЛЛЕТАЙЗЕРА | ||||
| Робот-манипулятор | Японский бренд-робот | Фанук | Кавасаки | |
| Робот немецкой марки | ПЛАКАТЬ | |||
| Швейцария Марка Робот | АББ | |||
| Основное исполнение параметры |
Скорость Емкость | 8 с за цикл | Отрегулируйте в соответствии с продуктами и расположение на слой |
|
| Масса | Около 8000 кг | |||
| Применимый продукт | Коробки, чехлы, сумки, Сумки-мешки |
Контейнеры, бутылки, банки, ведра и т. д. | ||
| Сила и воздух Требования |
Сжатый воздух | 7бар | ||
| Электроэнергия | 17-25 кВт | |||
| Напряжение | 380 В | 3 фазы | ||
| ПЛК | Сименс | |||
| Преобразователь частот | Данфосс | |||
| Фотоэлектрический датчик | Больной | |||
| Серводвигатель | Панасоник | |||
| Пневматический компонент | СМК | |||
| Низковольтная аппаратура | Шнайдер | |||
| Сенсорный экран | ШнайдерлСименс | |||
| Приводной двигатель | ШИТЬ | |||


